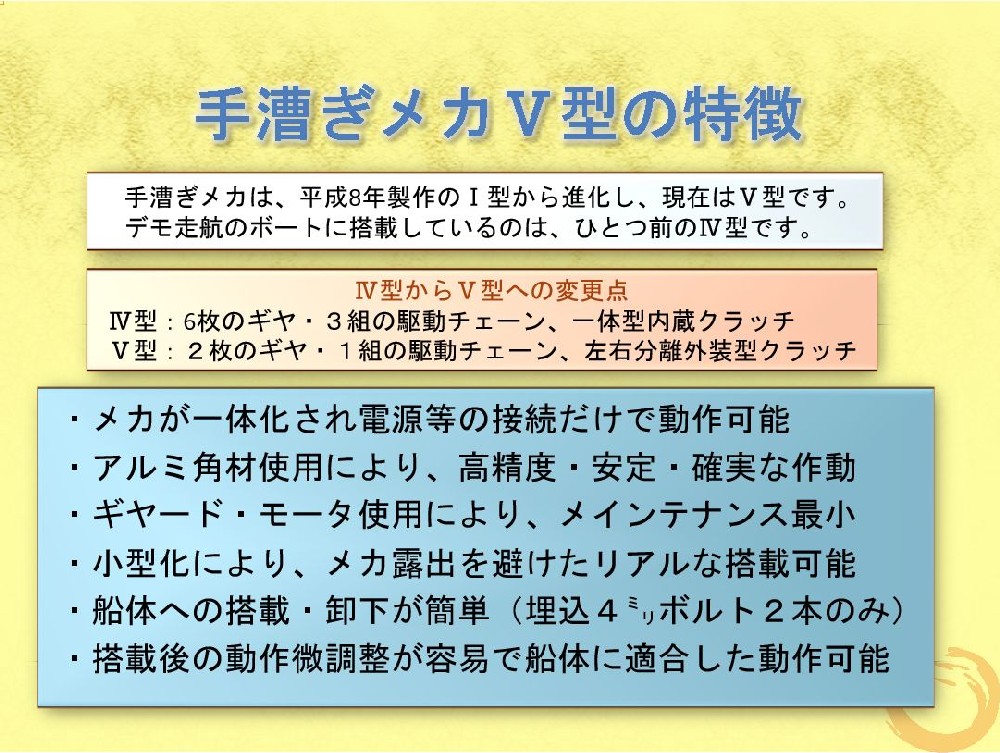
 |
||
| 一見、実物と見間違えるほどにリアルに走航する「手漕ぎボート」を製作した。 船体はSAITOの 「ちどり」 のハルを約20cmカットして製作した。 ■全長 : 約72㎝ ■全幅 : 約25㎝ ■乾舷高 : 約12㎝(ハル中央部)、 ■人形 : 1/6規格市販品利用 ■オール : 全長 : 約38㎝、(支点から先端まで32㎝) ■ブレード : 約5㎝幅17㎝長 ■オール回転数 : 可変(約20~60rpm) ■モーター : 75rpm/12V(ギヤ組込のジャンク品) ■電源等:12Vシールドバッテリー、ロベ535R(入力6~12V、最大出力34A)アンプ使用 |
||
 |
 |
 |
| ■ボート全体 右側面から漕ぎ手は半袖短パン (ベッカム)、彼女はミニスカート (?)の夏バージョンです。 |
■ボート全体 左前方から |
■オールと「漕ぎ手の手」は シリコンチューブで連接 |
 |
 |
 |
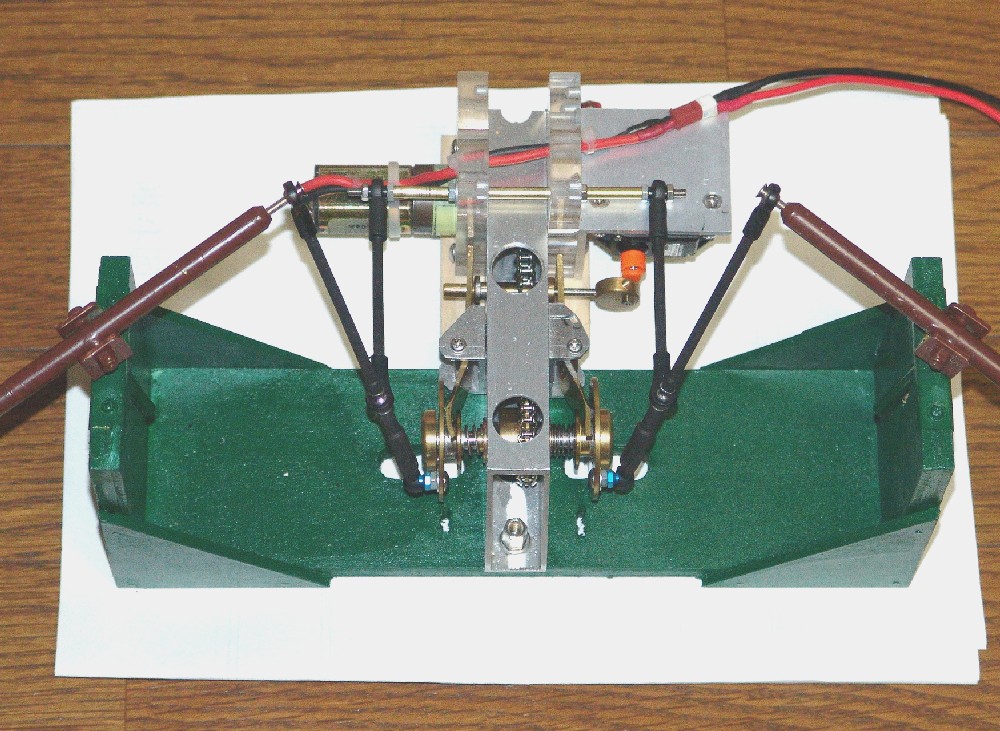
| ■メカ全体像 オール内端の3㎜ネジをクランク棒 の先端にナット止め |
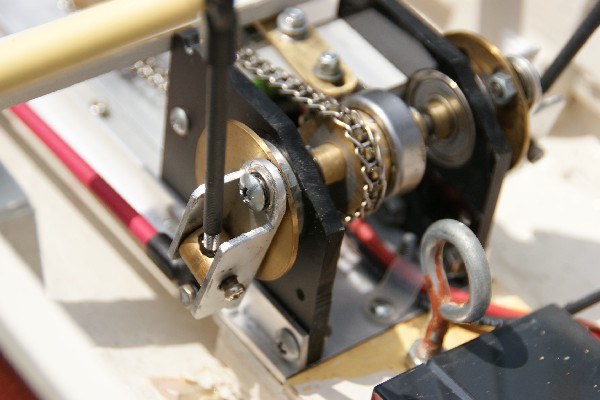
■クランク周辺 黒棒がオールに連接、赤棒が クランク下端の振れ止め。 ラダーチエーンとその右光っている のが、左右繰向用のクラッチ |
■受信機メカ タッパの中に入れ、防水処置 |
 |
 |
 |
| ■後方から走航時の様子 動画でないのが残念 |
■上部搭載物 左(船尾)から「漕ぎ手の彼女と 後部座板」 「中央すのこ」 「漕ぎ手と中央座板」「前部すの こ」 「前甲板」 |
■メカ(右後方から) 12Vバッテリーは横積、バッテ リーとメカの間のシャックルは、 ボートを水面に卸下する際の 吊り下げ環 |
![]()
 |
 |
■駆動転輪を上に置き、オール駆動部 の下端を支持棒で支えている。 ■オール駆動棒は、左右に動作可能 とし、オールの動きに追随できるように している。 |
|
 |
 |
■ラジコン技術2009.05号に掲載時 の手漕ぎメカ。 ①のクラッチ左右動作部にベアリング を使用、サーボの位置関係を再検討し、 修正。 ■ラジコン技術2010年2月号 |
|
 |
 |
■開発初期のメカ。駆動棒は,駆動輪 に平行に動作する。 ■オールの円運動を吸収するために、 オールの漕ぎ手側が収縮する構造とし ている。 |
|
 |
 |
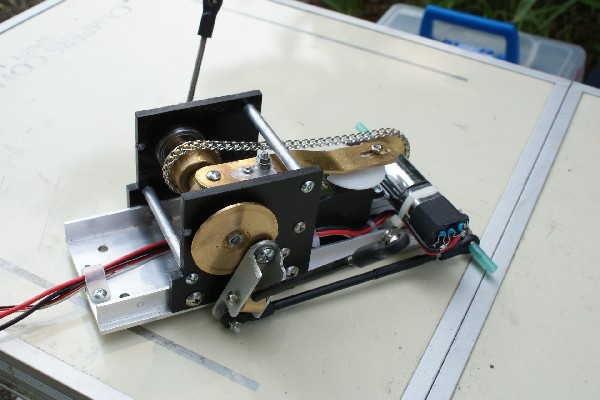
■メカの小型化(低床化)のために、 駆動輪を下部に固定棒を上部に移動し た案。 ■クラッチはピンタイプに変更、前の ドッグクラッチに比し、極めてスムーズ な接続を可能。 |
|
| 最終段階かな | |||
 |
 |
 |
|
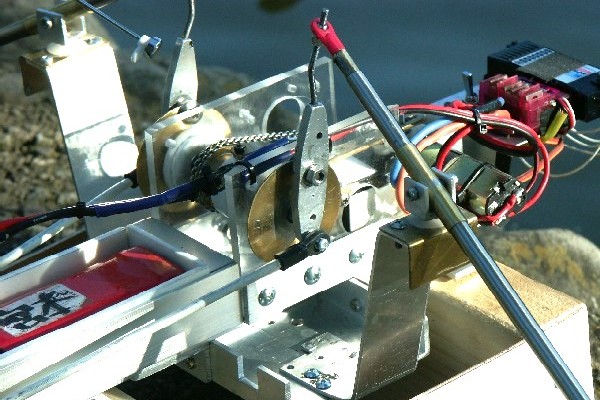
| ■最終案の駆動部外観と、床板の状況 。駆動輪の左側に床板から突き出して いる輪は、ボートを水面に降ろすときの 吊り下げ環。 |
■12Vシールド・バッテリーを床板で の縦積みから、後部座席下の横積み に変更,後部床板の更なる低床化 を図る。 |
■無線メカは、2.4Gタイプの使用によ り、コンパクト化し、バッテリーの上に 搭載。2.4G使用により、随時デモ走航 が可能となった。 |
|
 |
 |
 |
|
| ■メカ部の状況。サーボは、リンクを通 じてクラッチを動作するように修正。 |
■新メカを搭載した全体図。メカの小型 低床化により、初めの頃に比べ漕ぎ手 周辺がすっきりしている。 |
■新メカでほぼ完成し、走航するボート 。クラッチの断続が極めてスムースで、 ほぼ満足の走航。 |
|
 |
 |
 |
|
| ■上のSRBCロゴ入りキャップは不破会員が書いたものです。昔イラストレーターだった事もあり(今は現役引退) 全てを実物同様に書き上げています見事です。彼の作品は全て小型船が多く近々に紹介する予定。 |
|||
 |
|||
| 総轄 製作に着手してから相応の日数が経ちましたが、やっと満足できる段階となりました。 毎分30枚程度でゆったりとオールを漕ぎ、ボートが進むのを見てギャラリーが手を叩いて 感動し、これで又石神井公園に人気者が一人増えました。 ハル前方の円形(黒く)に見えるのはスピーカで、操縦位置からFMトランスミッターで送信し 、搭載のポケットラジオで受信し、ボートに乗っているカップルが周囲の人に話しかけるように アンプで拡声される様に隠し技を・・・。 ラジコン技術2010年2月号 |
|||
 |
|||
 |
|||
| 上記2作品が試行錯誤して略完成した手漕ぎボートです。 メカ関係を足元に納めるためコンパクトにし、ここまでリアルに動く様になるまでには約2年間の歳月を要した。 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
| 上記メカが資料に基づいて略完成された実物です このクラッチシステムは確か倉敷模型船クラブの田波さんの古代ギリシャ軍船のロの動きのメカを 参考に考えたものだと思います、違ったかな・・・ |
|||
 |
|||
お問合せの方は上記Eメールにてご連絡ください |
|||
 |
|||
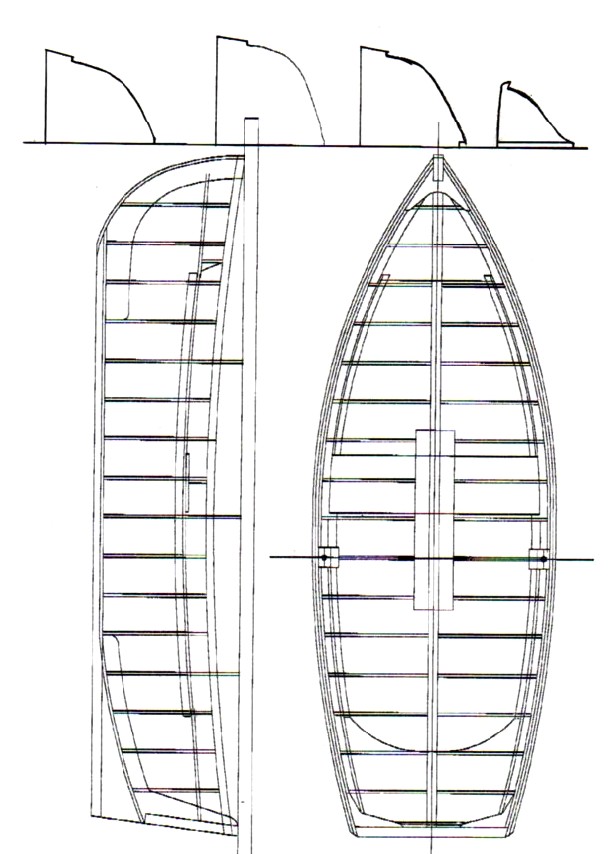
手漕ぎボートの自作船体 |
|||
  |
|||
そもそもこの手漕ぎボーの原点は約15年前に出来た上記の「リカちゃんボート」からです。 「私リカちゃん今日は石神井公園に遊びに来ているの」とリカちゃん人形が話しかけて来る様にしていた事もあり 石神井公園では有名になりギャラリーに非常に愛されていていました。何時もの場所に居ないと今日はリカやんは どうしたのとか、お休みですかとか池に訪れる子供達は心配されていました。 この手漕ぎボートを製作した会員は三年前に亡くなられ、この「リカちゃん」ボートは会員の一人が 遺品として引き取られ今でも大事にされ時々石神井公園に遊びに来ています。 |
|||
    |
|||
他SRBCの会員の皆さんの手漕ぎボートです |
|||
|
製作過程 ■平成19年3月に着手、約2週間で試作した「手漕メカ」は、ドライ・ランの結果、まずまずの成果を得ました。メカを搭載するハルは、会長保有のものを譲り受け、全長約70㎝になるよう後端をカットしました。両舷中央付近にオール受けの台木、船底前後にボルト各2本を埋め込んだ台座を接着しメカ基盤受けとしました。早速、石神 井公園で試走の結果、概ね期待通りに走航することを確認できました。 ■しかしながら、メカ部分が大きいため、乾舷付近まで甲板を張らなければならず、また、その後の「手持の人形を使用した、色々な漕ぎ手」を乗せてみたが、その動きは極めてぎごちなく、手漕ぎボートとしての実感にはほど遠いものがありました。その後約11ヶ月間、実感追求の試行錯誤を繰り返しました。メカの小型化を主眼に、 クランク部分の改良、底部クランク支点の変更等、逐次改良を重ね、また漕ぎ手の自然な動作を主眼に、市販の「関節可動人形(1/6規格)」の採用、シリコンチューブ使用の手首関節等により、概ね満足のいく域に達しました。 平成20年3月6日「ジャパン・インターナショナル・ボートショー2008in横浜」で、公開の場での初デモ走航を行い、見物の皆さんから好評を得ることが出来ました。 宮本 勝彦 |
{kind=link}