|
スペック
■全長 700mm ■最大幅 (オール支点付近) 245mm ■高さは船首 130mm ■オール支点位置(最大幅位置) 110mm
■ 船尾 120mm ■最終的な重量は未確認ですがハル(ウエイトを含む)とオールと含むメカ一式で約2Kg予定です。
|
 |
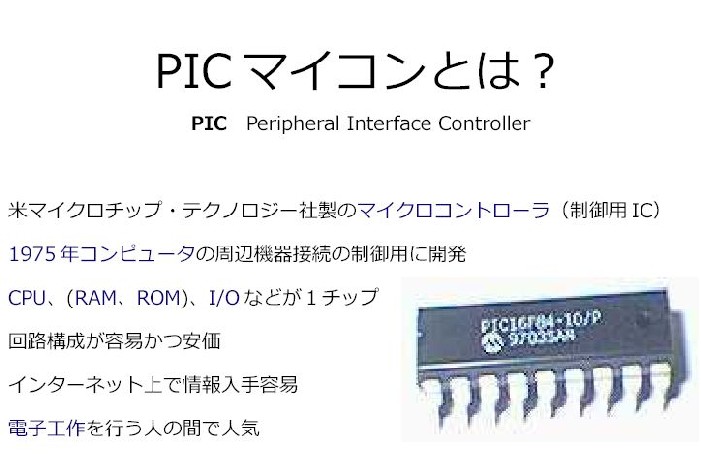
■PICマイコンとは?
過去数隻の手漕ぎボートを作成してきました。オール駆動用のメカは、全て
ギヤードモータを動力としリンク機構でオールの近楕円駆動、クラッチで
左右方向変換するものです。逐次の改良で機械式としての完成の域に
達したかと思います。しかしながら、オールの軌跡が必ずしも希望のものとは
なリませんでした。
そこで、サーボを使用し数値データでオールの前後・上下位置を決めて
やれば、思う通りにオールを動かせるのではないかと、考えました。送信機
からの前後・左右の2Chの信号を「PICで変換」し、4個のサーボを動かすこ
とで、左右オールの前後・上下の位置を決めることとしました。
|
 |
■PIC16F88
PICとは、米マイクロチップ・テクノロジー社製のマイクロコントローラ(制御用IC)です。1975年コンピュータの周辺機器接続の制御用に開発され、CPU,RAM,ROM,I/Oなどが1チップに組み込まれています。回路構成が容易で且つ安価に制作でき、インターネット上で様々な情報が入手できることから、電子工作を行う人の間で、人気があります。今期使用したPICは、「PIC16F88」という型番のものです。秋葉原の秋月電子で1個200円で購入しました。この他にセラロック(周波数指定用の素子)コンデンサー2個、受信機等と接続するための端子、組込基板等を含んで。材料費1,000円位で作成できます。但し、実際に動作させるためには、「手漕ぎボート用のプログラム]をパソコン上で作成し、PICにプログラムを書きこんでやらなければなりません。このプログラムの制作に時間を要し、時間×時給を考えると、その費用は?万円かなと思います。
|
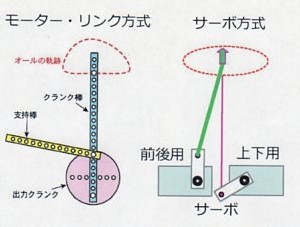 |
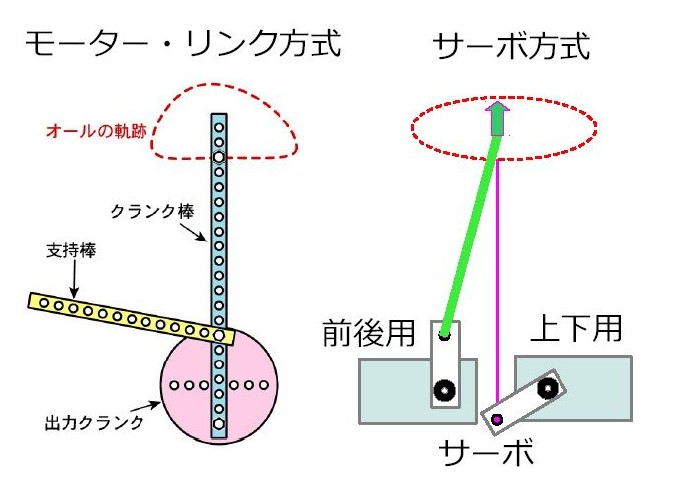
■モータによる駆動方式(左)
モーター・リンク方式(機械式)は、モータでクランク棒の下端を円形に動かします。そのクランク棒の中間を一端が固定された支持棒で支えてやると、クランク棒の先端が楕円状に動くので、そこにオールの持手部分を接続し、推進力としています。左右の方向転換は、旋回側の出力クランク(円盤)の回転を、クラッチで切ることにより行います。
■新開発のサーボ方式(右)
サーボ式は1本のオールに前後用、上下用の2個のサーボ使用します。左右で合わせて4個のサーボを使用しています。4個のサーボでどのようにオールを動かすかは、後述の写真等で説明します。
|
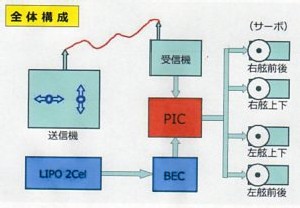 |
■サーボ方式の全体構成
送信機の2個のChを使います。1個の上下Chで前進・後進と速度の調整を行います。左右のChで方向を決めます。受信機からPIC基盤へは、受信機からの2個Chの出力を繋ぎます。PIC内で、入力Chに応じる4個のサーボ出力値が決められ、それぞれのサーボに信号が送られ、サーボが動作しオールを動かします。PICが送信機の2個Chの信号をサーボ用に4個Chに変換する仕事をします。送信機の上下Chのスティックを上に動かすと左右のオールは、同期して前進の動きをし、スティックの動きに応じ速度も変化します。左右Chを右に倒すと右オールがその位置で止まり、左オールの力で右に進みます。左右スティックを中央に戻すと、右オールは左オールに同期し、直進に戻ります。なお、スティックに応じる動作は、とりあえず機械式の動作の再現を目標として簡単な動作に限定していますが、次の段階では、左右オールの逆転などの動作をさせることも、プログラム次第で可能となります。
|
 |
■全体像
ボートの全体像です。
黒く見えている部分は、甲板を外しています。
ハルは、片側9枚の鎧張りです。
側板は、厚紙で船体から型紙を作り、それを基準に2ミリ厚のシナベニヤから切り出し、エポキシで接着しています。胴枠は製作の間だけ3枚使用し、接着剤乾燥後取り除いています。
|
 |
■前部
メカ部分の全体像です
船首側からコントロール装置(受信機・PIC等)、電源(2セルのリポ)、動作用サーボ(4個)、オールです。
|
 |
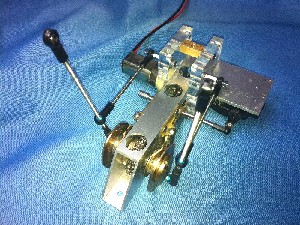
■メカ部拡大写真
写真下側から、電池(黒色、白ラベル)、サーボ4個、オール駆動部とオールです
サーボは、中央2個(白いホーンが見える)がオール上下用サーボです。ホーンの先にたこ糸を結び甲板の逆U字型(1ミリ真鍮線)のフックを通して上下に方向転換し、オールの持手につないでいます。オールは、先端ブレードの自重で下がり、オール持手が常に上がっているので、サーボからの糸で持手を下げるように動かすことで、上下位置を決めています。外側サーボ(サーボホーンは甲板下)が、前後用です。甲板の下でオール下部クランクにつながっています。オールの前後は、オール受けを前後にほぼ45度往復させることで前後に動かしています。オール受けは、6ミリのステンレス棒で甲板下に貫通させ、その下部にサーボ連結用のホーンをつけています。オール受けの6ミリ棒は、上下にベアリングをつけた13ミリの真鍮パイプ内を貫通しています。
|
 |
■コントロール部
写真の左が受信機、右がリポ7.5Vから受信機およびサーボ用の5V電源をつくるBECです。通常のスピードコントローラに組込みのBECは1〜3A程度の出力だが、サーボ4個の使用電力が大きいと判断し、8A(MAX15A)の市販BECを使用しています。
PIC・サーボ方式での消費電力がどの程度必要なのか、サーボの耐久性はどの程度なのか等、今後の試走の結果により改善・改良していこうと思います。
|
 |
■メカ底面(No1)
ハルから卸したメカ部をひっくり返した写真です。
写真の左が船首側です。船首部で前後に線がたくさん出ているのが、PIC基盤です。PIC基盤の中央付近に細長く見える黒い部品がPICです。写真右側部分でオール、オール受、オール下部クランクの様子を確認してください
なお、運航後のメインテナンスを考慮し、メカ部は完全にハルから分離でき、
メカ部のみで全ての動作点検ができるようにしています。またサーボ等の個々
の部品も全て取り外しての修理・交換等ができるようにしています。
メカ部は、キールに埋め込んだ2本のボルトにはめ込み、ナット2個の締め付けで定位置に固定できます。
|
 |
■メカ底面(NO2)
逆さにしたメカ部から、底板を外した状態です。写真の右側が船首になります。
オール前後用のサーボとオール軸のクランクの関係がわかると思います。
中央付近で光っている長方形のものは、ウェイト用の鉛です。
|
| テスト走航の結果報告 |
4月1日の日曜日、久しぶりに池に行きました。天候も暖かく、ギャラリーも多く、快適な走航日和でした。
さて、総会の折に紹介したPIC使用の手漕ぎボート、ハルの仮塗装が終わったので、人形無しで試走してみました。
その結果は、速度がゆっくりな場合はマアマアなのですが、速度を上げようとするとオールの前後動作幅が極端に狭まり、
推進不足の状態となりました。これは、前後動作用のサーボのトルク不足と判断しました。
帰宅後、再点検の結果、サーボトルクの不足が決定的なものであることが、判明しました。
現行サーボは、GWS製S03T/2BBB(秋月電子1個1000円)というトルク7,4kg、速度0.33Sec/60°のサーボです製作時
には、将来更に大トルクのサーボ(高価)に変えるが、当面の試作間は、安いサーボで代用しようと考え、トルクが7Kgもあれば、
十分だろうと 思っていたのです。トルクについて改めて]計算してみました。試走時の全備重量は約2Kgです。このことは、
片側のオールで直進時に約1Kgの推力が必要となります。オールのブレード中心とオール支点間の距離が約27Cmから
、必要トルクは、約27(1×27)Kg-Cmとなります。サーボと連結しているクランク長が約3Cmですので、サーボトルクは、
9(27÷3)Kg以上必要となります。全く単純な事前点検ミスということです。
解決策としては、船体重量の軽減、オール長の短縮、サーボクランクをオールクランクより短くするなどがありますが、一番の
改善策は、大トルクサーボへの交換です。現在標準サイズで、トルク20Kg-Cm超のサーボは1個2万円近くします。どなたか、
安価な大トルクサーボの情報があれば、教えて下さい。
また、この試験間うっかりミスで、メカ1式を水没させてしまいました。会長のタモ網で5分後に回収、直ちに分解し、受信機・
PIC基盤・BEC基盤を立石さんのビニール袋に入れ、萩原さんのアルコールを注いで、徐水処置をしました。現時点未確認
ですが、多分全品復活すると思います。会長、立石さん、萩原さん、それから色々と助けていただいた皆様、有難うございました。
製作の際、整備性の向上のため、殆どの部品をボルト・オンで取り付けし、簡単に分解できるようにしています。
今回もこのおかげで、電子関係の部品をすぐにアルコールづけ出来ました。
皆さんも、沈没、水没等事故防止には十分お気をつけ下さい。
|
下記は最新の機械式手漕ぎメカです
数人の方が使用している機械式メカです。
|
 |
|
(■最新の機械式手漕ぎメカ
自作の最も新しい機械式手漕ぎメカです。
左後方に見えるギヤ付きモータで前方の転輪を回転、連接するロッドでオールを楕円状軌跡で動かしています。右奥のサーボで転輪に
設けたクラッチを断続し、左右の方向転換をします。
何が、最新型かというと、構成部品を最小限にすると共に、可能な範囲で市販汎用部品を使用し工作工数を少なくすることで、製作費を
低減したことです。このメカは機械式としての完成度は高いのですが、理想的なオールの動きを得るための調整幅が限定されてしまいます。
|
 |
管理人のコメント
手漕ぎボートに興味を持ち始めて4年?試行錯誤で機械式メカは略完成・・・
今回紹介したサーボ方式(コンピューター制御)は製作者が独自に開発し
又独自にプログラムをくみ何度も失敗を繰りかえし概ね完成まじかと思
われる。クラブ員にも提供出来る様にしたいものですね・・・。
YouTube 001
YouTube を観る範囲では簡単そうですが、なかなかどうして・・・
|
| 参考資料 |